1. soutěžní projekt týmu Marek Votroubek / Jan Král / Petr Bubeníček
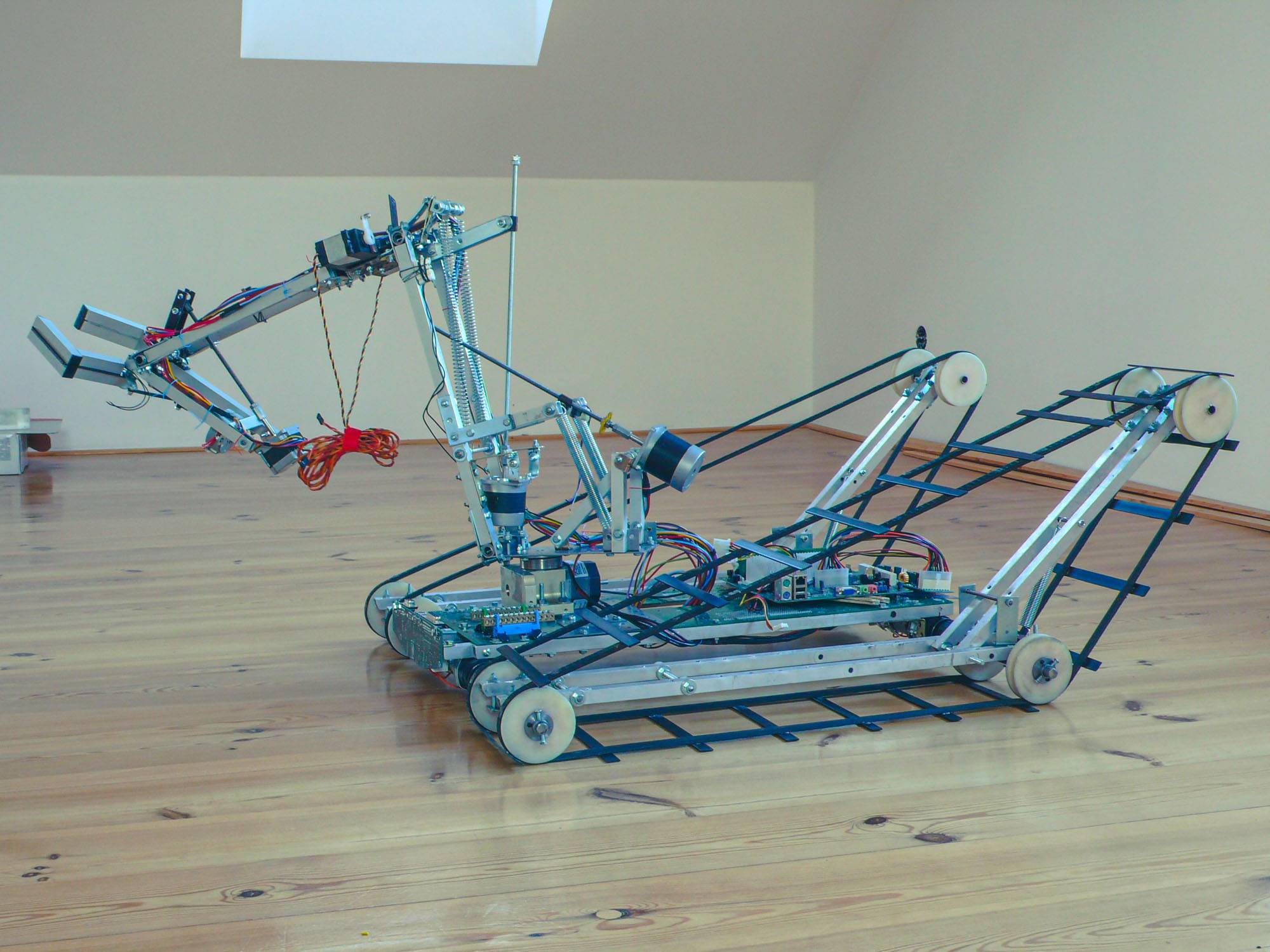
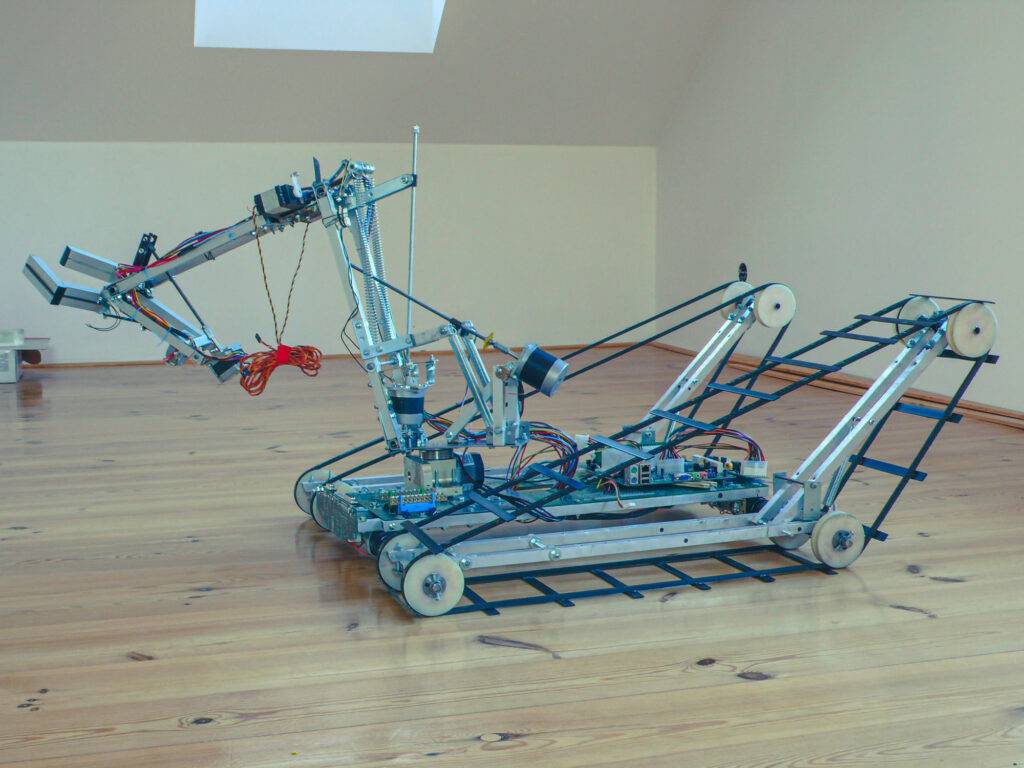
Po velmi dobrých zkušenostech s předchozím testovacím modelem AS6-LWR jsme radikálně zvětšili měřítko. Jedním z podstatnějších cílů bylo konstrukci přizpůsobit tak, aby byla schopna vykonávat úkoly.
Z hlediska náročnosti stanovených cílů byl k týmu Jan Král / Marek Votroubek přibrán další člen, Petr Bubeníček.