cvičný středoškolský projekt týmu Marek Votroubek / Jan Král
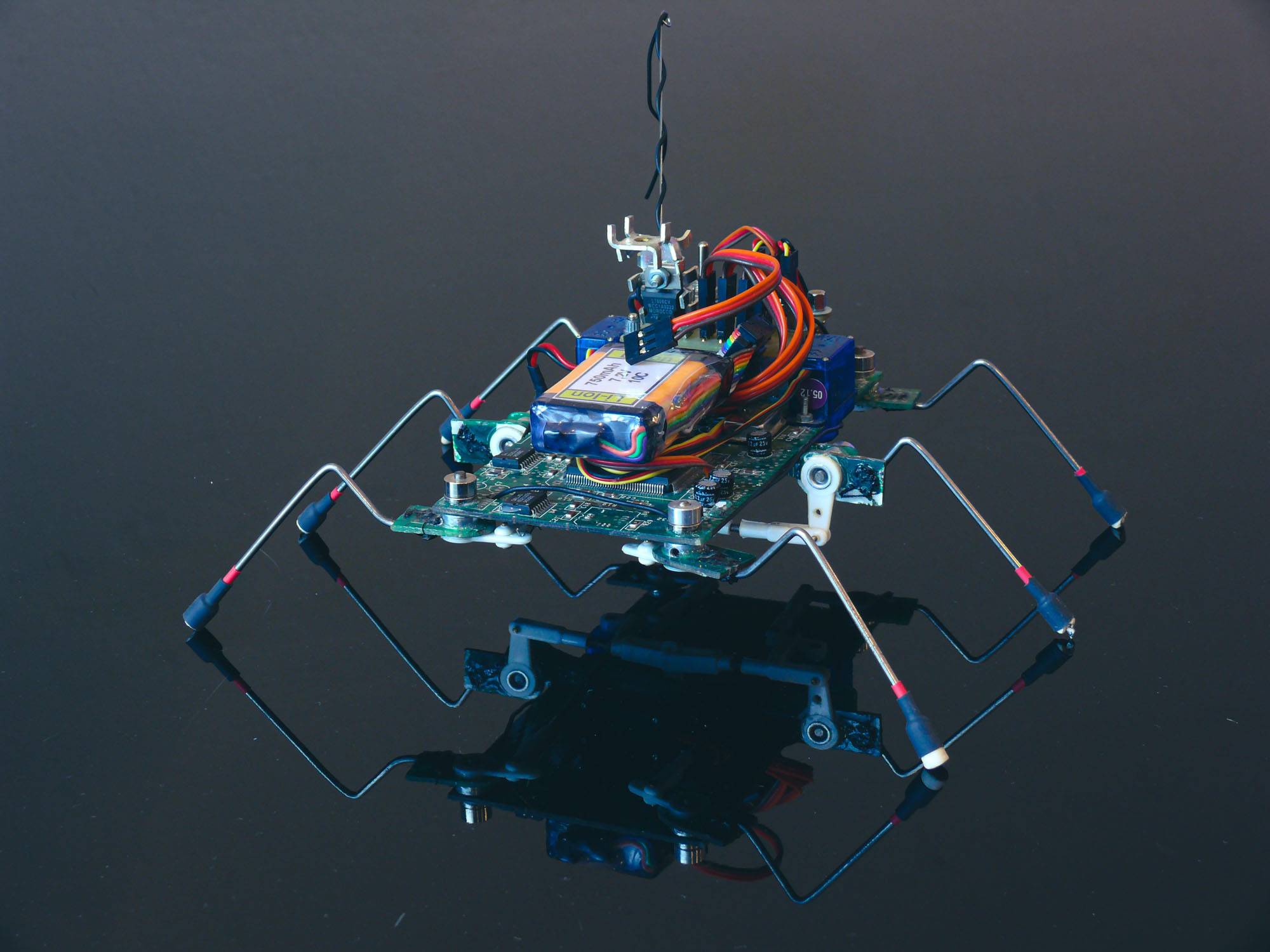
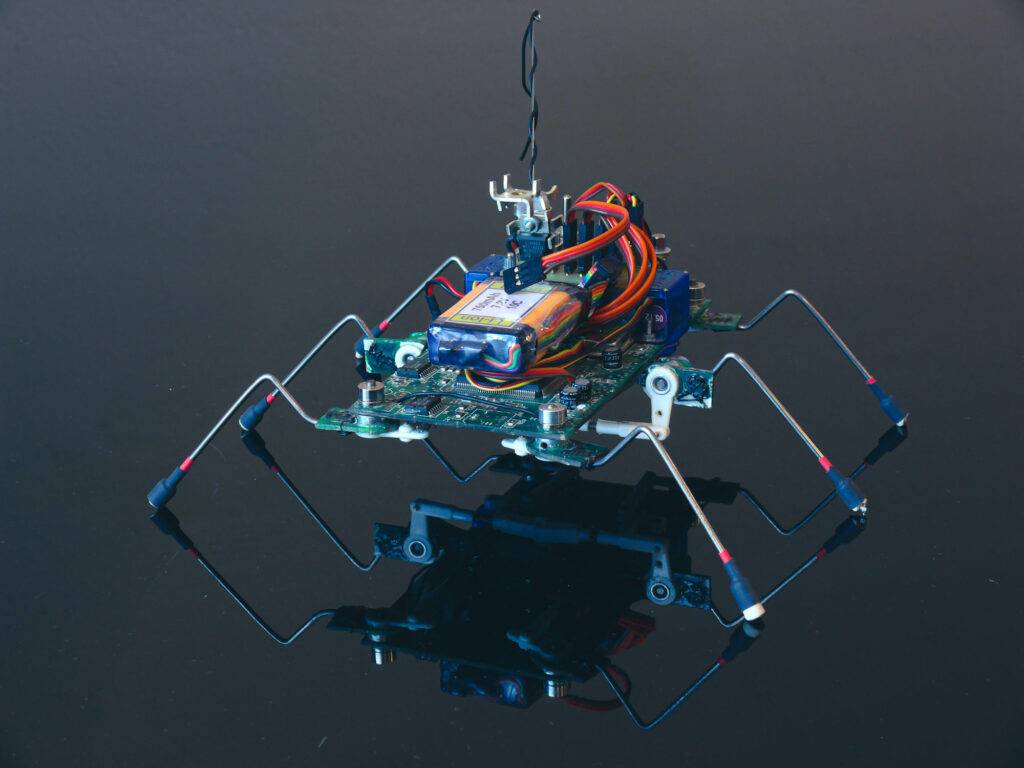
Tento projekt byl základním kamenem pro vznik a vývoj týmu Jan Král/Marek Votroubek. Jedná se o jednoduchou ale důmyslně promyšlenou konstrukci, která vyniká velmi nízkou hmotností a absolutně minimalizovanou cenou. Základem pohybu je 6 nohou, které se otáčí buď kolem vertikální nebo horizontální osy. Pro pohyb slouží pouze 3 servomotory, napájení mají na starosti 2 lehké lithiové články.
Součástí robota je i malý jednočipový modul sloužící pro řízení automatizovaného chodu a eliminaci složitého ovládání každého motoru samostatně.