vysokoškolský projekt týmu Marek Votroubek / Monika Svědirohová
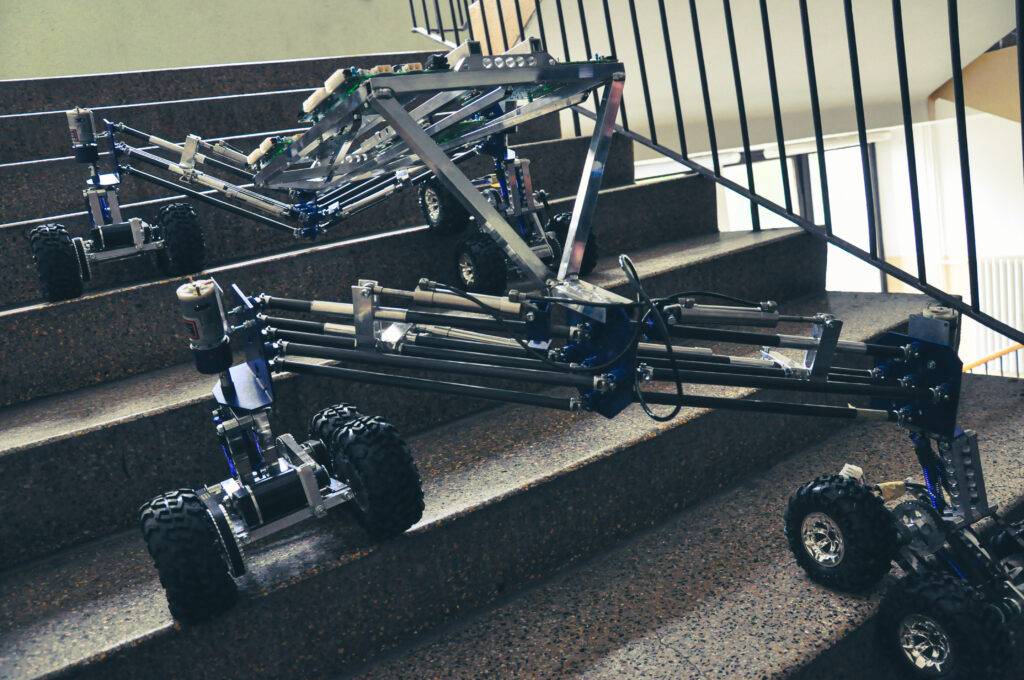
6IXTEN je experimentální robot, který sestává ze speciálnho podvozku, určeného pro jízdu ve členitém terénu, a elektroniku, která rozezná typ překážky a její velikost, a dokáže řídit geometrii podvozku tak, aby se ji co nejlépe přizpůsobila. Podvozek je možno řídít v módu klasického automobilu, nebo v módu „chůze“, kterou zajišťuje hydraulická soustava.